Programming Boty

| Auteur-e-s | Utilisateur:Lydie BOUFFLERS, Utilisateur:Sophie.linh |
|---|---|
| Année de fabrication | 2016 |
| Technologie utilisée | Découpe laser |
| Type | Jeu, Activité |
| Domaine d’enseignement | Informatique |
| Niveau d’enseignement | Ecole primaire (élémentaire), Enseignement facultatif, Ecole primaire (moyen) |
| Public cible | Enfants, Adolescents |
| Public cible (Age) | 6-7 ans, 7-8 ans, 8-9 ans, 9-10 ans, 10-11 ans, 11-12 ans |
| Mots clés | programmation |
| Lien vers le cours STIC | https://edutechwiki.unige.ch/fr/STIC:STIC III (2016) |
| Fichier source | Fichier:Programming Boty.zip |

“Programming Boty” est un jeu de plateau inspiré de l'application Lightbot (disponible sur Apple). Il est destiné à proposer une initiation à la programmation informatique et à l’algorithmique au travers l'utilisation de variables et de procédure. L'objectif de ce kit n'est pas de faire un cours d’informatique mais bien d’initier à la “pensée informatique” c’est-à-dire de donner des clés permettant de comprendre cet univers. Les publics visés sont donc les novices en informatique qu'ils soient enfants ou adultes.
A l'origine, le public visé sont les enfants de 6 à 12 ans soit des élèves de degré primaire. L’enseignant, quant à lui, interviendrait pour expliquer les règles du jeu et gérer le niveau de difficultés (niveau 1, 2 ou 3).
Cependant, ce kit pourrait également être destiné à des adultes n’ayant aucune notion d’informatique comme les séniors, les étudiants débutant la programmation soit tous les novices en algorithmique et programmation. Un modérateur jouerait alors le rôle que l’enseignant occupe pour les élèves de degré primaire.
La question de l’apprentissage du code informatique est de plus omniprésente dans l’éducation. Il constitue une compétence transversale mais de plus en plus fondamentale avec l’évolution des nouvelles technologies de l’information et de la communication. A l'échelle du monde et en premier lieu dans les pays dits développés, le code va donc devenir de plus en plus présent. Aussi, la première cible pour ce kit sont donc les pays dits industrialisés et, dans un proche avenir, les pays dits en voie de développement.
Objectif de conception
Programming Boty est un kit de construction destiné à proposer une initiation à la programmation informatique afin d'initier à la pensée / la logique informatique. Il ne s'agit donc pas de proposer un cours d'informatique à destination de futurs professionnels.
Objectif pédagogique
A l'issue de l'apprentissage avec ce kit, les apprenants seront capables d’utiliser les principes de base de la programmation et de l'algorithmique en manipulant des instructions et des procédures.
[[La phase de conception du kit comporte deux sous-phases:
- La réalisation d'un prototype papier pour matérialiser le jeu,
- Puis, la réalisation des dessins des éléments sur un logiciel.
Prototype papier
Une fois les bases conceptuelles posées, un prototype papier a d'abord été réalisé.
Date de réalisation : Octobre 2016
Type de matériel : papier
| Croquis | Description | |
|---|---|---|
| Plateau en damier (8x8) |  |
Il s’agit du plateau sur lequel vont être disposées des pièces mécaniques que le robot devra aller ramasser selon les déplacements qu’on lui aura programmé. |
| Boty, le robot |  |
Il s’agit du robot dont il faut programmer les déplacements. Le robot “tiendra debout” par un système de chevalet ou par imbrication dans un support horizontal. |
| Personnage robot |  |
Il s’agit des pièces qui seront disposées sur le plateau de jeu et que le robot doit ramasser (élaboration pièces selon la thématique "mécanique"). |
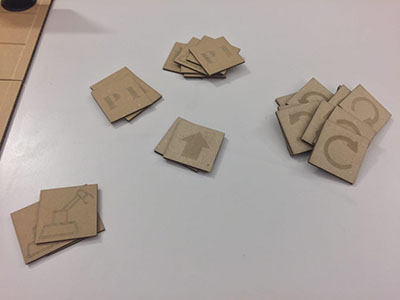
| Jetons de déplacement |  |
Il s’agit des éléments (jetons) dont les joueurs vont se servir pour programmer les déplacements du robot sur le plateau:
a. Procédure 1 (le robot exécute les déplacements indiqués dans la procédure 1); b. Avancer (le robot se déplace d’une case vers l'avant); c. Procédure 2 (le robot exécute les déplacements indiqués dans la procédure 2); d. Ramasser l’objet (le robot ramasse l’objet de la case); e. Tourner à droite (le robot s’oriente vers la droite, mais n’avance pas); f. Tourner à gauche (le robot s’oriente vers la gauche, mais n’avance pas). Le joueur aura plusieurs pièces de chaque type à sa disposition. |
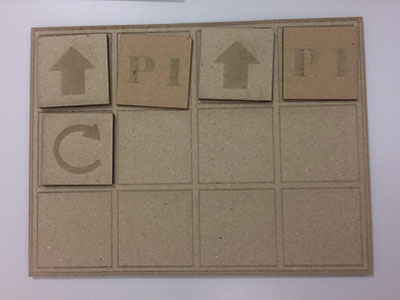
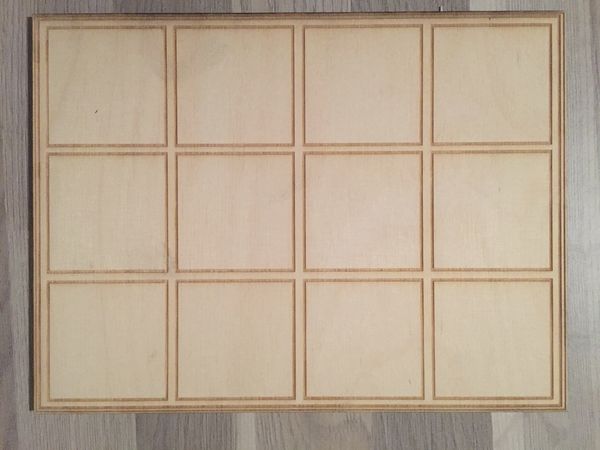
| Support principal |  |
Le support principal est prévu pour disposer les jetons de déplacements dans les emplacements prévus. Il doit accueillir la solution retenue pour faire avancer le robot. Il peut accueillir 12 pièces de déplacement maximum. |
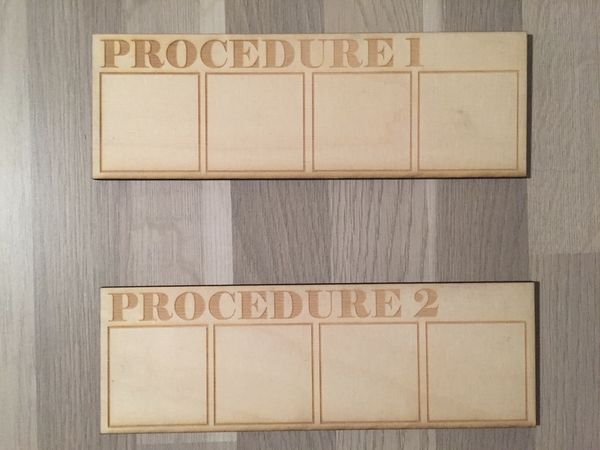
| Support procédure 1 et support procédure 2 |   |
Les joueurs placent les jetons aux emplacements prévus. Les supports de procédure peuvent accueillir 4 jetons chacun. |
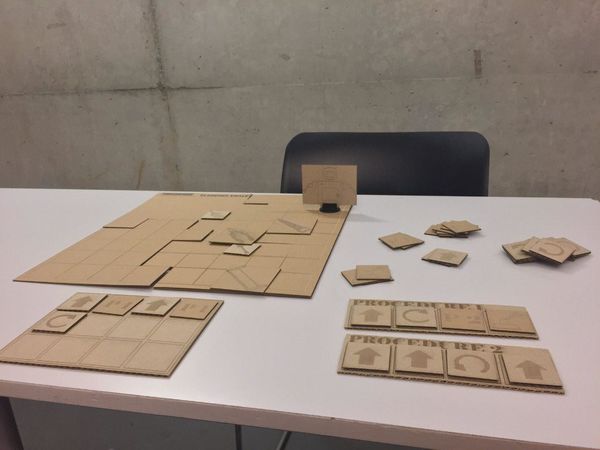
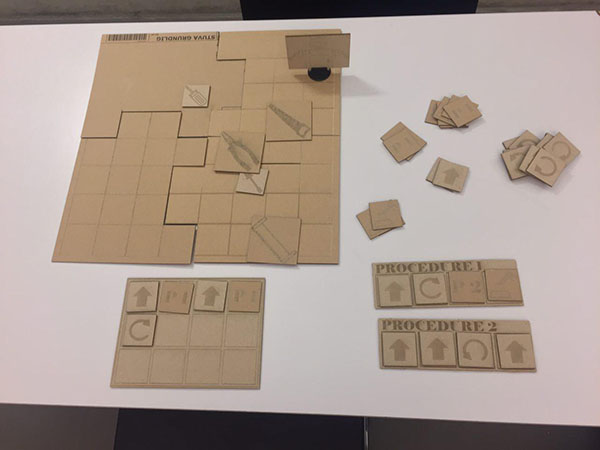
Croquis du jeu

- Ci-dessus, exemple de partie de niveau 3 (beaucoup d’objets à ramasser et utilisation de deux procédures) avec présentation d'une solution possible. Le robot démarre la partie dans le coin inférieur gauche.
Fichiers SVG Une fois le prototype papier finalisé, les dessins des différents éléments du Kit ont ensuite été réalisés sur Inkscape.
Les dessins ont été en partie réalisés par nos soins et en partie importés de banques d'images libres de droits. Dans ce dernier cas, les sources des images figurent dans les fichiers SVG de chaque dessin.
Prototypage carton
Date de réalisation : Novembre / Décembre 2016
Type de matériel : carton ondulé
Paramètres de la Trotec Speedy 100R: 
Prototype carton
-
 Kit de construction (face)
Kit de construction (face) -
 Kit de construction (vue de dessus)
Kit de construction (vue de dessus)


-
 Procédure 1 et procédure 2
Procédure 1 et procédure 2 -
 Support principal
Support principal -
 Pièces de déplacement et pièces mécaniques
Pièces de déplacement et pièces mécaniques



Bilan et correctifs à apporter :
Après la réalisation de ce prototype papier, voici les éléments qui restaient à finaliser :
- Le nombre de jetons de déplacements à prévoir : à adapter selon les niveaux ? avoir un nombre fixe ?
- Système de points : évaluation de l’aspect motivant / démotivant du système de points tel qu’il est actuellement,
- Dimensions du kit constructif : taille des pièces / plateau / supports,
- Prise en compte d'une fonctionnalité additionnelle du kit : aller au delà des scénarios fournis, c'est à dire laisser la possibilité de créer d’autres maps de positionnement (aspect non limitatif du jeu); ce qui suppose de prévoir suffisamment de pièces (combien?)
- Maps de positionnement : à tester lors du test utilisateur et à modifier si nécessaire.
Réalisation définitive sur contreplaqué
Date de réalisation : Janvier 2016
Type de matériel : contreplaqué bouleau 4 mm
Paramètres de la Trotec Speedy 100R : ![]()
Réalisation
-
 Plateau de jeu
Plateau de jeu -
 Boty, le robot
Boty, le robot


-
 Support Principal
Support Principal -
 Supports procédures
Supports procédures


-
 Pièces de déplacement
Pièces de déplacement -
 Outils
Outils -
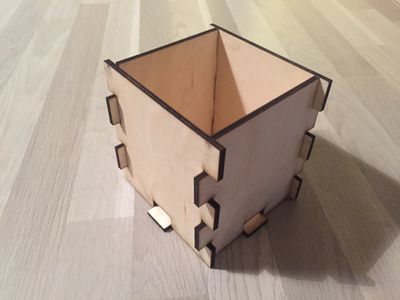 Boîte à outils
Boîte à outils



Bilan L'impression et la découpe ont été, en règle générale, de bonne qualité. Le seul bémol réside dans l'impression du plateau de jeu. Les éléments de repérage autour de la grille (chiffres et lettres utiles pour placer les pièces) n'ont pas tous été correctement imprimés.]]
Trotec Speedy 100R
Type de matériel : contreplaqué bouleau 4 mm
Paramètres de la Trotec Speedy 100R : ![]()
Le kit est composé de :
- Un plateau de jeu,
- Boty, le robot à déplacer,
- Des “jetons de déplacements” pour programmer les mouvements Boty sur le plateau,
- Des “outils” (pièces mécaniques) que Boty doit ramasser au cours de son parcours,
- De “supports principaux” pour la disposition des différentes instructions (i.e jetons de déplacements) permettant de mouvoir Boty,
- De “support procédures” pour la conception des procédures par les joueurs (niveau 2 et 3),
- NB : Pour plus d’informations concernant le matériel, se reporter à la section Prototype papier.
Le jeu se joue en relative autonomie; l’enseignant/modérateur intervient dans le ‘mode practice’ pour expliquer les règles du jeu et gérer le niveau de difficultés (niveau 1, 2 ou 3).
Objectif et règles du jeu
L’objectif est de programmer les déplacements du robot afin que ce dernier aille ramasser toutes les pièces mécaniques disposées sur le plateau.
Avant de commencer, le robot et les pièces mécaniques sont placés sur le plateau. Pour cela, des maps de positionnements sont à disposition selon différents degrés d'expertises que l’enseignant / modérateur introduit petit à petit:
- Dans un premier temps, des déplacements simples en n’utilisant que le support principal (niveau 1)
- Puis introduction de la procédure 1 (niveau 2),
- Et enfin l'utilisation des deux procédures à la fois (niveau 3).
La difficulté du jeu augmente donc avec le nombre des pièces disposées sur le plateau et le nombre limité de pièces de déplacements pouvant être positionnées sur le support principal (d’où la nécessité pour les joueurs de recourir aux supports procédures pour pouvoir résoudre l’énigme).
Le jeu se déroule en deux étapes:
- Phase de réflexion : les joueurs réfléchissent à une solution et placent les jetons de déplacement sur leurs supports pour organiser leur solution (support principal et supports procédures);
- Phase d’action : les joueurs tentent de résoudre l’énigme en déplaçant le robot selon leur programmation. Par exemple, on peut imaginer que l’un lit le code pendant que l’autre met le robot en mouvement par exemple. Peut-être aussi l’enseignant peut entrer en jeu à ce moment là, pour vérifier qu’ils exécutent correctement les déplacements.
A cette étape, soit la programmation est réussie (le robot a réussi à ramasser toutes les pièces), soit la programmation comporte encore des erreurs. Dans ce dernier cas, les joueurs reprennent l’étape de réflexion, et ainsi de suite jusqu’à ce qu’ils trouvent une solution.
Afin de d'expliciter les règles aux joueurs, une documentation explicative du jeu et de ses règles est disponible sous Programming Boty _ Règles du jeu
Fonctionnement du kit
Nous avons imaginé un fonctionnement selon deux “modes” afin que le jeu se prolonge au delà de l’apprentissage de concepts :
- Mode practice
Le mode “practice” correspond à la phase d’apprentissage des concepts de programmation. L'apprenant est seul ou en groupe (de 2 à 5 joueurs). En groupe, ils doivent réfléchir collectivement à la combinaison de instructions la plus efficace possible afin que le robot puisse atteindre son but en utilisant un minimum de instructions. Pour cela, ils doivent échanger et se mettre d’accord sur la procédure en classant les éléments sur le support mais sans pouvoir toucher physiquement le robot sur le plateau. Ils doivent donc être capable de conceptualiser la procédure mentalement avant de la réaliser physiquement sur le plateau.
- Mode compétition
Ce mode permet de prolonger l’utilisation de l’outil pédagogique (apprentissage de concepts) décrit dans le mode “practice”. Une fois l’apprentissage des concepts réalisé, le mode compétition peut entrer en jeu. Il fait intervenir deux groupes d’apprenants qui se livrent une ‘battle’ pour trouver le plus rapidement possible la solution.
Egalement, pour apporter de l’intérêt au jeu et surtout susciter la motivation des apprenants, nous avons imaginé un système de points pour le mode compétition selon le barème suivant:
- +1 point par case non utilisée sur le support principal,
- +5 points pour l’équipe qui a trouvé la solution,
- +5 points lorsque la solution est trouvée du premier coup,
- 0 point pour l’équipe qui n’a pas été suffisamment rapide pour présenter sa solution ou si elle n’a pas trouvé de solution,
- -1 point lorsque la solution présenté par l’équipe la plus rapide est erronée, la tentative est dite “échouée”. Dans ce cas, l’équipe adverse peut alors présenter sa solution si elle en a une. Si l’équipe adverse n’a pas de solution, les deux équipes continuent de réfléchir jusqu’à ce qu’une des deux équipe annonce une nouvelle solution.
Qui est l’équipe gagnante ?
Au terme des trois tours de jeu (i.e 3 maps de positionnement), l’équipe gagnante est l’équipe qui remporte le plus de points. C’est l’équipe qui aura montré le plus de rapidité et d’efficacité à coder les actions du petit robot!