« STIC:STIC IV (2021)/Grand projet: Doudou Bobo » : différence entre les versions
| Ligne 72 : | Ligne 72 : | ||
Le premier gros changement réalisé, par rapport au premier prototype est la forme de notre peluche. Même si un animal permet de créer un lien avec les enfants, notre volonté avec ce projet est de permettre l'expression d'une douleur. En effet, l'idée est que les enfants puissent montrer sur la peluche ce qu'ils ressentent. C'est pour cela que prendre un bonhomme pour modèle nous a semblé plus pertinent. Nous avons donc récupéré un [https://svgsilh.com/fr/image/917750.html modèle] déjà existant. Celui-ci a nécessité quelques modifications telles que la suppression de certains éléments. | Le premier gros changement réalisé, par rapport au premier prototype est la forme de notre peluche. Même si un animal permet de créer un lien avec les enfants, notre volonté avec ce projet est de permettre l'expression d'une douleur. En effet, l'idée est que les enfants puissent montrer sur la peluche ce qu'ils ressentent. C'est pour cela que prendre un bonhomme pour modèle nous a semblé plus pertinent. Nous avons donc récupéré un [https://svgsilh.com/fr/image/917750.html modèle] déjà existant. Celui-ci a nécessité quelques modifications telles que la suppression de certains éléments. | ||
Entre le premier prototype et celui-ci, les éléments à insérer dans la peluche se sont précisés. En effet, nous avons confirmé le fait d'utiliser un AdaFruit et 6 capteurs. Pour le lien entre les deux, après plusieurs tests, nous avons décidé d'utiliser des pinces crocodile. La peluche allant être utilisée par des enfants, ce système nous a paru plus solide. Pour faire fonctionner l'AdaFruit, nous avons aussi dû penser à intégrer un boitier avec une pile. | |||
Pour ce qui est des matériaux, nous sommes restés sur du tissu fin et doux. Les "feuilles" étant déjà découpées, nous les avons mesurées afin de voir la taille maximale que pouvait avoir notre peluche: 19.6cm x 30.9cm. Cela nous a semblé plutôt correct pour tous les éléments que nous devions intégrer dans la peluche. Nous avons opté pour un tissu rouge pour la face arrière et un tissu blanc pour la face avant: ces deux couleurs correspondant à celles des hôpitaux. La couleur blanche pour la face avant nous arrangeait aussi car nous voulions que la lumière des LED de l'AdaFruit passe à travers et soit bien visible. | |||
====Prototype final==== | ====Prototype final==== | ||
Version du 2 septembre 2022 à 15:07
Introduction
La problématique émerge du champs professionnel de la santé, de la pédiatrie plus exactement et en lien avec l'apprentissage par l'enfant dès 4-6, à pouvoir s'exprimer sur sa douleurs avec l'aide des soignants qui vont accompagner et expliquer aux enfants comment exprimer cette douleur et ainsi pouvoir la traiter adéquatement.
Problème
Les jeunes enfants, dès 4/6 ans, ont parfois du mal à exprimer leurs douleurs, et les soignants qui doivent les aider à apprendre à identifier, évaluer et localiser cette douleur afin de la traiter adéquatement, doivent avoir des outils pertinents pour travailler sur cette douleurs. Il existe des échelles de la douleur ou même des objets mais limités dans l'interactivité et la pertinence. Notre projet permets aux soignants de travailler sur l'intensité de la douleurs, la localisation, et l'expression de celle-ci grâce à un support de type jouet - peluche interactive qui va permettre à l'enfant d'utiliser ce dispositif représentant un personnage avec des membres et zones du corps similaires à celle d'un humains, et l'aider, l'accompagner à faire le parallèle avec son corps à lui. L'utilisation de ce dispositif doit être fait à l'aide d'un professionnel présent qui guide, accompagne et récolte les informations auprès de l'enfant.
calibration des capteurs de touche Adafruit
Cahier des charges
Contexte et public
Le contexte est le domaine de la santé, en pédiatrie, chez les enfants dès 4 à 6 ans et les soignants qui accompagnent et les prennent en charge, qui sont eux, le public cible aussi.
Objectifs
Que les soignants puisse aider les enfants à apprendre à exprimer et identifier leurs douleur grâce à un outils, un support de type jouet-peluche que nous souhaitons créer. L'objectif est double finalement car nous devons imaginer un outils pour les soignants qui prennent en charge les enfants mais aussi un outils pour les enfants eux-mêmes qui vont l'utiliser pour s'exprimer sur cette douleur (intensité, localisation, etc.).
Besoins
Nos besoins sont matériel, avec une peluche de récupération (pour répondre au critère aussi de ré-utilisation dans un but écologique), mais aussi le dispositif Adafruit que nous allons programmer, du matériel conducteur comme du tissu et autres comme le Velostat et des câbles électriques afin de créer des capteurs de pression. Nous allons par ailleurs avoir besoins d'un alimentation pour faire fonctionner le dispositif électronique. Nous auront peut-être besoin de réaliser un boitier grâce à l'impression 3D pour maintenir le dispositif, mais aussi utiliser le découpage du vinyl pour dissimuler le circuit et laisser apparaitre seulement les LED. Enfin nous utiliseront la broderie pour identifier les zone de pression sur la peluche.
Apports théoriques
Présentation du projet
L'idée est de placer dans une peluche à destination des enfants, des capteurs conçus par nos soins avec des matériaux et dispositifs électronique adaptés, capables de mesurer la pression que nous pouvons exercer sur ceux-ci de manière variable afin de faire le parallèle avec la douleurs ressentie et son intensité. Ces capteurs de pression, ""input"", seront placés dans les membres de la peluche, bras et jambes ainsi qu'au niveau du ventre et de la tête pour que l'enfant puisse faire parallèle avec son propre corps et exprimer cette douleurs à l'aide de l'objet-peluche en guise de support pour faciliter l'expression de celle-ci et la communication avec les soignants. C'est imaginé comme un outils thérapeutique et pédagogique également à destination des soignants afin qu'ils puissent mesurer la douleurs chez l'enfant dès 4 ans et lui apprendre à évaluer, localiser et exprimer sa douleur afin qu'elle soit traitée et soulagée.
Nous allons devoir pour la réalisation de ce projet, étudier les propriétés des matériaux conducteurs envisagés, programmer et coder un dispositif électronique de type Adafruit afin qu'il produise un signal lumineux renvoyant à l'intensité de la douleurs et un code couleurs s'y référant. Mais également utiliser une machine à broder afin d'identifier les zone de pression sur la partie extérieure de la peluche.
Solution
Après des échanges sous forme d'entretiens formels et informels avec des collègues soignants travaillant auprès d'enfants, ils ont indiqués qu'une peluche est un objet rassurant pour les enfants car c'est un jouet souvent réconfortant et permettant d'établir le lien et servant de support de communication avec eux, notamment les plus petits. Ils peuvent identifier en pointant du doigt les zones du corps ou il ont mal et quelles est l'intensité de cette douleurs. Cela doit être, selon eux, simple d'utilisation et facile à comprendre pour l'enfant qui souffre et le soignant qui récolte les informations de l'enfant dans un contexte de crise.
Présentation des différents prototypes :
Nous avons réalisés plusieurs prototypes papiers, "faible fidélité" (low-fi), afin de réfléchir aux dimensions, la localisation des points de pressions, visage, et les composants à l'intérieur mais aussi pour réfléchir aux matériaux que nous aurions besoin.
Avant d'avoir lu attentivement les consignes, nous pensions réaliser la peluche de la même manière que nous avions créé le monstre lors du cours STIC IV. En effet, nous voulions simplement utiliser du ruban conductible, de la mousse, du velostat, une LED tricolore (voire plus) et une pile.
Cependant, nous avons réalisé qu'il fallait utiliser une carte électronique: nous avons donc changé de point de vue sur le projet.
Prototype 1
Pour ce premier prototype l'idée est de se représenter ce que l'on veut faire, quels matériaux à utiliser, quels outils et quelles machines nous allons avoir besoin, à quoi cela doit ressembler, comment créer des capteurs mais aussi quelles sont les potentielles limites techniques et savoirs à mobiliser.

Nous sommes donc partis sur une peluche en forme d'animal afin que les enfants puissent en quelque sorte s'attacher à elle. Ayant déjà un modèle de chat grâce au monstre réalisé pour le cours STIC IV, nous avons pensé réutiliser ces travaux en augmentant la taille du modèle pour se rapprocher de la taille d'une peluche réelle.
Egalement, augmenter la taille du modèle permettait de rentrer notre carte électronique ainsi que tout les autres éléments que nous allions utiliser.
En ce qui concerne la carte électronique, nous avons décidé d'opter pour l'AdaFruit. En effet, lors des tests pendant certaines activités du cours STIC IV, son utilisation nous est parue plutôt simple. De plus, un avantage proposé par l'AdaFruit est la présence de LED déjà intégrées.
Pour finir, nous avons pensé mettre des capteurs dans les deux bras et les deux jambes de la peluche, mais aussi dans la tête et le ventre. Lors de cette étape, nous n'avons cependant pas pensé au lien entre les capteurs et l'AdaFruit, ni au code nécessaire pour faire fonctionner le toout.
Ayant choisi de réutiliser le modèle du chat, nous savions déjà à peu près les matériaux et machines à utiliser:
- du tissu fin et plutôt doux pour le corps de la peluche
- de la laine pour coudre la peluche
- des fils de couture pour la brodeuse
- la découpeuse laser pour découper le modèle et préparer les trous pour coudre la peluche
- la brodeuse afin d'embellir la peluche grâce à un visage, mais aussi pour indiquer la position des capteurs
Prototype 2
Pour ce deuxième prototype, nous savons précisément ce que nous voulons faire et ce dont nous avons besoin mais nous devons désormais imaginer comment mettre en place les différents éléments entre eux à l'intérieur de la peluche.

Le premier gros changement réalisé, par rapport au premier prototype est la forme de notre peluche. Même si un animal permet de créer un lien avec les enfants, notre volonté avec ce projet est de permettre l'expression d'une douleur. En effet, l'idée est que les enfants puissent montrer sur la peluche ce qu'ils ressentent. C'est pour cela que prendre un bonhomme pour modèle nous a semblé plus pertinent. Nous avons donc récupéré un modèle déjà existant. Celui-ci a nécessité quelques modifications telles que la suppression de certains éléments.
Entre le premier prototype et celui-ci, les éléments à insérer dans la peluche se sont précisés. En effet, nous avons confirmé le fait d'utiliser un AdaFruit et 6 capteurs. Pour le lien entre les deux, après plusieurs tests, nous avons décidé d'utiliser des pinces crocodile. La peluche allant être utilisée par des enfants, ce système nous a paru plus solide. Pour faire fonctionner l'AdaFruit, nous avons aussi dû penser à intégrer un boitier avec une pile.
Pour ce qui est des matériaux, nous sommes restés sur du tissu fin et doux. Les "feuilles" étant déjà découpées, nous les avons mesurées afin de voir la taille maximale que pouvait avoir notre peluche: 19.6cm x 30.9cm. Cela nous a semblé plutôt correct pour tous les éléments que nous devions intégrer dans la peluche. Nous avons opté pour un tissu rouge pour la face arrière et un tissu blanc pour la face avant: ces deux couleurs correspondant à celles des hôpitaux. La couleur blanche pour la face avant nous arrangeait aussi car nous voulions que la lumière des LED de l'AdaFruit passe à travers et soit bien visible.
Prototype final

Prototype final éteint

Prototype final LED blanches

Prototype final LED jaunes

Prototype final LED rouges

Prototype face derrière





Après de nombreuses réflexions et deux prototypes papier, nous sommes passés au prototype final avec cette fois la réalisation concrète de notre projet.
Dans un premier temps nous avons préparé le fichier à découper avec la découpeuse laser. La préparation de celui-ci s'est faite sur Inkscape, de la même manière que pour le monstre et les autres objets réalisés dans le cours STIC IV. Nous avons cependant dû faire des modifications sur le modèle utilisé, car celui-ci proposait une double ligne, ce qui allait poser problème à la découpe. Ensuite, il a fallu programmer un peu la machine en indiquant la matière utilisée, la vitesse de découpe...
Ensuite, nous avons préparé cette fois-ci le fichier pour la brodeuse. Nous avons gardé certains éléments du modèle de base tels que les yeux, ainsi que la bouche. Cette dernière a cependant été modifiée pour être plus attrayante. Nous avons ajouté des cercles de couleurs aux endroits où nous voulions mettre les capteurs pour que cela soit plus visible par les enfants. Après cela, il a fallu aussi programmer afin que la brodeuse fasse son travail. Malheureusement nous avons rencontré quelques problèmes de nouveau au niveau de cette double ligne existant sur le modèle de notre peluche. Cela faisait constamment sauter les fils et il a fallu faire quelques modifications pour régler le problème.
Après avoir obtenu nos deux morceaux de tissus pour la peluche, nous nous sommes penchés sur le contenu. Il a fallu refaire des tests sur les capteurs afin d'être sûrs d'avoir quelque chose de fonctionnel. Egalement, nous avons travaillé sur le code qui était indispensable pour faire fonctionner le tout. Une fois ces deux éléments définis, nous avons observé et testé des positionnements sur le tissu afin de voir ce que cela allait donner une fois la peluche cousue. Comme imaginé lors du second prototype, nous avons placé le boitier d'alimentation en dessous de l'AdaFruit, ce dernier placé dans le ventre de notre peluche. Pour ce qui est des capteurs, nous en avons placé un dans le bras, un dans la jambe et un dans la tête. I
Voici le lien menant à une vidéo de démonstration du prototype final :
https://tecfaetu.unige.ch/etu-maltt/aegir/deschac3/stic-4/Video_prototypefinal_doudoubobo_sticIV.mp4
- L'idée (après avoir allumé le dispositif via l'interrupteur dans le dos de la peluche) est d'exercer une pression, avec nos doigts, sur les points de pression sur les membres de la peluches mais aussi la tête et le ventre, brodés en rouge. Afin d'identifier la zone sur la peluche (qui représente des parties du corps faisant référence au corps humain de l'utilisateur) où la douleurs se localise et en appuyant plus ou moins fort, cela indique l'intensité de cette douleurs : Blanche = faible douleurs, jaune = une douleurs moyenne et rouge = douleur intense.
- Quand nous allumons le dispositif de la peluche, elle est par défaut sur jaune dans nos test, c'est probablement dû au fait que les pince crocodile exerce une pression déjà sur le circuit. Il faudrait modifier la manière de connecter les fils au circuit Adafruit.
- Les capteurs ne sont pas assez sensibles ou semblent faire de faux contacts. Après plusieurs tests de différents capteurs, il faudrait encore les perfectionner car chaque matériaux à des caractéristiques qui influence la pression exercée, ce qui influe sur le résultat souhaité. Peut-être connecter des capteurs électroniques déjà construits peut-être une solution.
- Nous avons seulement insérer 3 capteurs, dans les membres droits, bras et jambe, de la peluche et la tête, en effet il n'était pas possible d'en mettre plus à l'intérieur par manque de place et si nous voulions refermer en cousant celle-ci. Mais cela donne déjà une représentation efficace de comment cela aurait dû être avec d'autres capteurs en plus.
Traces
Les capteurs de pression
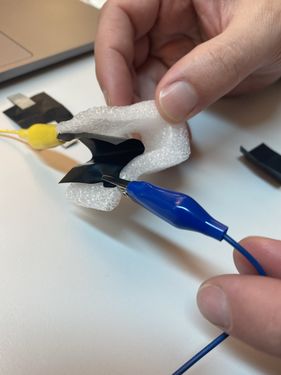
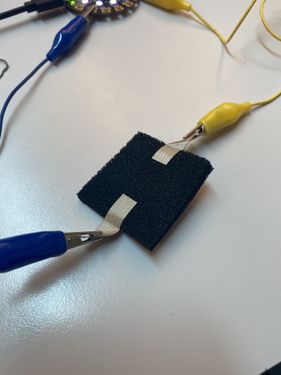
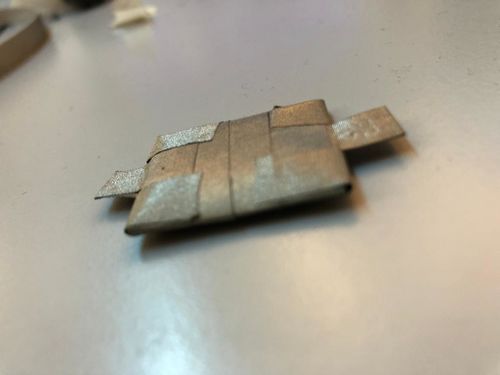
Nous avons testé différents capteurs de pression (ci-dessous), que nous avons essayé de créer nous même avec différents matériaux, à insérer dans les membres du doudou (la peluche), avec différents matériaux et différents assemblage au regard des différentes contrainte de l'objet mais aussi des matériaux eux-mêmes.
Nous avons finalement choisi le capteur de pression numéro 9 (ci-dessous, avec ici deux photos, sur la photo bis, il est "ouvert en deux", nous allons le replier sur lui même et insérer un morceau de mousse plastique afin de faire varier l'intensité de la pression quand on appuie. C'est finalement une deuxième itération et amélioration du capteur numéro 3. Qui semblait être le plus prometteur dans nos différents tests et expériences.
Les matériaux privilégiés qui le compose sont :
- le "velostat" noir conducteur souple (sensible à la pression)
- le ruban conducteur gris
- du scotch blanc isolant
- un morceau de mousse souple (non conducteur)
- les cables électriques avec pinces crocodiles

Capteur de pression prototype 1

Capteur de pression prototype 2

Capteur de pression prototype 3
Capteur de pression prototype 4
Capteur de pression prototype 5

Capteur de pression prototype 6
Capteur de pression prototype 7

Capteur de pression prototype 8

Capteur de pression prototype 9

Capteur de pression prototype 9 bis










Parties extérieures
Pour les matériaux qui composent le reste de la peluche, nous avons utilisés pour la face avant et de derrière du tissu de type feutrine pour sa souplesse et sa résistance à la manipulation mais aussi pour pouvoir broder les zones pressions et le visage et coudre ces deux faces ensembles. Nous avons inciser la face de derrière pour accéder à l'interrupteur et avons mis un bouton pour refermer et ouvrir pour accéder à celui-ci mais aussi changer les piles au besoin, de plus les bords d el'incision ont été brodé (fils noir) à la mains afin de renforcer cette zone sensibles et souvent manipulée/ouverte (cf. photo ci-dessous).
Parties intérieures
- Nous avons collés avec de la colle à tissus de la mousse de rembourrage sur les deux faces de feutrine (parties internes), afin de maintenir et protéger le tout et pour le confort de manipulation (cf. photo ci-dessous).
- Nous avons ajoutés une couche de mousse fine rigide, plus dense afin de renforcer le dispositif et le rendre plus solide lors des manipulations, tel "un squelette", un trou a été découpé pour accéder à l'interrupteur depuis la face de derrière (parties jaune et orange, cf. photos ci-dessous)
- Enfin nous avons disposer l'ensemble du dispositif électronique, l'Adafruit, le boitier d'alimentation (avec deux piles AA), les cables et les capteurs. Nous avons scotchés ces éléments à la mousse rigide afin de maintenir le tout en place et éviter que cela ne bouge lors de la couture mais aussi lors de manipulations futures (cf. photo ci-dessous).

Face avant et mousse de rembourrage

Face arrière avec incision

Mousse dense autocollante

Ensemble des éléments du dispositif électronique




Code
Pour notre projet, l'objectif est que des enfants puissent exprimer leur douleur sans forcément parler. Pour cela, nous voulions placer plusieurs capteurs dans une peluche, à des endroits stratégiques tels que les bras, les jambes, la tête ou encore le ventre. L'idée était donc de trouver un moyen de changer la couleur des LED de l'AdaFruit selon la pression exercée sur des capteurs.
Afin de faire fonctionner le Doudou Bobo comme nous le souhaitions, il a fallu trouver un code approprié à l'AdaFruit.
Lors du cours STIC IV, nous avons pu tester l'AdaFruit avec différents codes et différents capteurs. Ayant peu de compétences et de connaissances en codage, nous avons donc choisi de réessayer certains de ces codes en tentant de les modifier.
D'abord, nous avons testé ce code avec MakeCode. Cependant, il ne correspondait pas à ce que nous cherchions. En effet, il permettait d'allumer les LED de l'AdaFruit, mais seulement lorsque des "pins" étaient pressés.
Nous nous sommes alors plutôt orientés sur ce code, que nous avons également testé avec MakeCode. Celui-ci se rapprochait vraiment de notre idée: selon la pression exercée sur un capteur lié à un "pin", les LED de l'AdaFruit changent de couleur.
Cependant, nous avons souhaité plusieurs choses:
- changer les couleurs s'affichant
- faire en sorte qu'il y ait plusieurs capteurs
Pour ce qui est du premier point, nous avions choisi de rester sur une couleur neutre - le blanc, lorsque la pression exercée est en dessous ou égale à 30. Pour une pression en dessous ou égale à 50, nous avons choisi la couleur jaune. Enfin, pour une pression supérieure à 50, nous avons choisi du rouge.
Malheureusement, nous n'avons pas pu garder ces choix tels quels. Effectivement, pour une raison inconnue, l'affichage des couleurs étaient inversé. Pour les garder dans l'ordre que nous souhaitions, nous avons du inverser ces couleurs dans le code. Ainsi on retrouve du rouge pour une pression exercée en dessous ou égale à 30, du jaune pour une une pression en dessous ou égale à 50 et du blanc pour une pression au dessus de 50. Au final, plus on appuie fort sur les capteurs de notre Doudou Bobo, plus la couleur passe du blanc au rouge.
Pour ce qui est du point concernant la présence de plusieurs capteurs, malgré notre volonté d'en intégrer 6-7 voire plus, cela n'a pas été possible. En effet, pour un capteur, il faut un branchement à un "pin", mais aussi à un "ground". Avec l'AdaFruit, il y a seulement 3 "ground", ce qui nous bloque dans l'utilisation maximale que de 3 capteurs. Nous avons donc fait 3 exemplaires du code pour un seul capteur:

Nous avons décidé d'utiliser les "pins" A2, A4 et A7 afin de pouvoir bien orienter les capteurs et les pinces crocodile dans la peluche.
let weight = 0
forever(function () {
weight = pins.A4.analogRead()
if (weight <= 30) {
light.setAll(0xff0000)
} else if (weight <= 50) {
light.setAll(0xffff00)
} else {
if (weight > 50) {
light.setAll(0xffffff)
}
}
pause(500)
})
forever(function () {
weight = pins.A7.analogRead()
if (weight <= 30) {
light.setAll(0xff0000)
} else if (weight <= 50) {
light.setAll(0xffff00)
} else {
if (weight > 50) {
light.setAll(0xffffff)
}
}
pause(500)
})
forever(function () {
weight = pins.A2.analogRead()
if (weight <= 30) {
light.setAll(0xff0000)
} else if (weight <= 50) {
light.setAll(0xffff00)
} else {
if (weight > 50) {
light.setAll(0xffffff)
}
}
pause(500)
})
Objectifs Scrum
Matériel nécessaire
- Matériel électronique
- Circuit imprimé Adafruit Circuit Playground Express
- Cable électrique pour raccordé les capteurs de pression au circuit central Adafruit
- Boitier d'alimentation à piles avec 2 piles AA
- Matériaux conducteurs (ruban et velostat)
- Matériel non électronique
- Tissu non conducteur pour le revêtement extérieur du Doudou
- Mousse de rembourrage
- Mouse fin dense rigide autocollante
- Fils et aiguille pour couture et broderie
- Colle à tissu
- Machines utilisées
- Découpeuse laser Trotec Speedy 100R / Principe
- Brodeuse Brother PR1050X
- Machine à coudre Singer
- Ordinateur et logiciels dédiés pour traiter les fichiers et les envoyer sur les machines
Test(s) de la solution
- Travail individuel: documentation dans votre page projet avec un cognitive walkthrough ou similaire pour le testing.
- Travail à 2: Comme (1) + avec un test utilisateurs (3 personnes minimum) c'est à dire création d’un scenario (tâches à réaliser), passation et analyse des résultats. Comme ressources pour le testing, vous pouvez utiliser les pages en:Usability testing.
- Travail à 3: Comme (2), plus un questionnaire qui mesure les 3 dimensions (utile, utilisable, plaisant). Pour ce questionnaire, vous devez utiliser un modèle validé. Plusieurs modèles sont disponible dans la page en:Usability and user experience surveys mais attention à bien mesurer ces trois dimensions. Pour la restitution et la discussion des résultats, vous devez trianguler vos résultats (ceux obtenus avec le test utilisateur et ceux obtenus avec le questionnaire).
- Travail à 4: Comme (3), plus une analyse de besoins un peu plus poussée (voir par exemple en:Scenario of use) et une revue de la littérature plus complète.
Discussion
Design
Concernant le design, il est nécessaire de prendre en compte plusieurs aspects:
- C'est important de vérifier les fichiers pour la brodeuse, notamment pour les contours, pour le paramétrage de la machine, cela doit être en traits indiqué sur le logiciel, sinon les fils sautent.
- Trouver les bons réglages de la découpeuse laser est essentiel, si cela est trop puissant par exemple, ça prend feu ! Les réglages utilisés pour la découpe de notre feutrine sont : Puissance = 65, Vitesse = 3, Résolution = 1000 ppi.
- Coudre à la main était bien trop laborieux pour fermer la peluche, la tension était trop importante, une machine à coudre nous a bien aidé (Merci à Vanessa pour ses précieux conseils).
Tests utilisateurs
Pistes d'améliorations possibles
- Créer des capteurs plus efficaces, plus sensible permettant une nuance plus large dans l'intensité de pression.
- Peut-être également intégrer du son, à la pression ou non, mais celui émit par l'Adafruit n'était pas très joli ni tellement pertinent.
- "Humaniser" peut-être encore plus la peluche ?
Cette partie inclus deux sous parties :
- Discussion du design (et si c'était à refaire ou à améliorer),
- Discussion des résultats de vos tests utilisateurs
Fichiers et licence
Fichiers :
- Lien vers le fichier SVG : https://tecfaetu.unige.ch/etu-maltt/aegir/deschac3/stic-4/peluche_3.svg
- Lien vers le fichier PES : https://tecfaetu.unige.ch/etu-maltt/aegir/deschac3/stic-4/peluche_3.pes
- Lien vers le fichier MP4 : https://tecfaetu.unige.ch/etu-maltt/aegir/deschac3/stic-4/Video_prototypefinal_doudoubobo_sticIV.mp4
{kind=link}
- Musique de la vidéo de démonstration du prototype final : "Itsudemo" de Asuka Ito (iMovie)
Licence :

- Cette œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution - Pas d’Utilisation Commerciale 4.0 International.
Bibliographie
Insérer ici les références utilisées pour votre projet.