« STIC:STIC III (2018)/Découpeuse laser brachistochrone » : différence entre les versions
| (13 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{ | {{tutoriel | ||
= | |fait_partie_du_cours=Physicalisation de données | ||
== | |fait_partie_du_module=STIC:STIC III (2018)/Prototypes de physicalisation - découpe laser|Prototypes de physicalisation - découpe laser | ||
|pas_afficher_sous-page=Non | |||
|statut=à finaliser | |||
|difficulté=débutant | |||
|cat tutoriel=Physicalisation de données | |||
}} | |||
par [[Utilisateur:Nicolas_Burau|Nicolas Burau]] | |||
== La courbe brachistochrone == | |||
Si la distance minimale entre deux point a et b dans l'espace réel (avec a plus haut que b) est une droite, il n'en va pas de même pour le temps minimal de parcours d'un point matériel de vitesse initial nulle entre ces deux points dans un champs gravifique continu. | Si la distance minimale entre deux point a et b dans l'espace réel (avec a plus haut que b) est une droite, il n'en va pas de même pour le temps minimal de parcours d'un point matériel de vitesse initial nulle entre ces deux points dans un champs gravifique continu. | ||
| Ligne 13 : | Ligne 22 : | ||
L'équation paramétrique de la courbe est de la forme suivante: | L'équation paramétrique de la courbe est de la forme suivante: | ||
<math> | |||
<math>\begin{cases} x(t)=r(t-\sin(t)) \\ y(t)=r(1-cos(t))\end{cases} \forall t \epsilon R, r=Cste</math> | |||
== Objectif == | == Objectif == | ||
| Ligne 40 : | Ligne 50 : | ||
Après plusieurs utilisations, l'ajout d'un cache sur la partie verticale de la courbe (1/x)^3 peut s'avérer utile pour éviter que la bille ne sorte de la rampe. | Après plusieurs utilisations, l'ajout d'un cache sur la partie verticale de la courbe (1/x)^3 peut s'avérer utile pour éviter que la bille ne sorte de la rampe. | ||
<gallery | <gallery widths=200px heights=200px> | ||
Fichier:Rampe brachistochrone svg forme finale.svg|alt=La forme finale de la rampe brachistochrone pour la découpeuse laser|La forme finale de la rampe brachistochrone pour la découpeuse laser. | Fichier:Rampe brachistochrone svg forme finale.svg|alt=La forme finale de la rampe brachistochrone pour la découpeuse laser|La forme finale de la rampe brachistochrone pour la découpeuse laser. | ||
Rampe droite svg.svg|alt=La forme finale de la rampe droite pour la découpeuse laser.|La forme finale de la rampe droite pour la découpeuse laser. | Fichier:Rampe droite svg.svg|alt=La forme finale de la rampe droite pour la découpeuse laser.|La forme finale de la rampe droite pour la découpeuse laser. | ||
Rampe chute libre svg.svg|alt=La forme finale de la rampe "chute libre" pour la découpeuse laser|La forme finale de la rampe "chute libre" pour la découpeuse laser | Fichier:Rampe chute libre svg.svg|alt=La forme finale de la rampe "chute libre" pour la découpeuse laser|La forme finale de la rampe "chute libre" pour la découpeuse laser | ||
Cadre de support rampe brachistochrone.svg|alt=Le cadre de support pour soutenir le dispositif de la rampe brachistochrone.|Le cadre de support pour soutenir le dispositif de la rampe brachistochrone. | Fichier:Cadre de support rampe brachistochrone.svg|alt=Le cadre de support pour soutenir le dispositif de la rampe brachistochrone.|Le cadre de support pour soutenir le dispositif de la rampe brachistochrone. | ||
</gallery> | </gallery> | ||
=== Découpe et encollage des rampes === | === Découpe et encollage des rampes === | ||
<gallery> | <gallery heights=300px mode="packed"> | ||
Fichier:Les 3 rampes découpées.png|alt=Les 3 rampes découpées au laser.|Les 3 rampes découpées au laser | Fichier:Les 3 rampes découpées.png|alt=Les 3 rampes découpées au laser.|Les 3 rampes découpées au laser | ||
Fichier:Encollage d'une rampe avec la bordure.png|alt=Encollage d'une rampe avec la bordure|Encollage d'une rampe avec la bordure | Fichier:Encollage d'une rampe avec la bordure.png|alt=Encollage d'une rampe avec la bordure|Encollage d'une rampe avec la bordure | ||
Fichier:Encollage des 3 rampes.png|alt=Encollage des 3 rampes.|Encollage des 3 rampes. | Fichier:Encollage des 3 rampes.png|alt=Encollage des 3 rampes.|Encollage des 3 rampes. | ||
Les pièces du cadre de support.png|alt=Les pièces du cadre de support pour les rampes.|vignette|Les pièces du cadre de support pour les rampes. | Fichier:Les pièces du cadre de support.png|alt=Les pièces du cadre de support pour les rampes.|vignette|Les pièces du cadre de support pour les rampes. | ||
</gallery> | </gallery> | ||
=== Dispositif === | === Dispositif === | ||
[[Fichier:Montage du dispositif final.png|alt=Montage du dispositif final des rampes.|gauche|vignette|Montage du dispositif final des rampes.]] | [[Fichier:Montage du dispositif final.png|alt=Montage du dispositif final des rampes.|gauche|vignette|Montage du dispositif final des rampes.]] | ||
Dernière version du 7 janvier 2020 à 12:29
| Physicalisation de données | |
|---|---|
| Module: STIC:STIC III (2018)/Prototypes de physicalisation - découpe laser | |
| ⚐ à finaliser | ☸ débutant |
| ⚒ 2020/01/07 | |
par Nicolas Burau
La courbe brachistochrone
Si la distance minimale entre deux point a et b dans l'espace réel (avec a plus haut que b) est une droite, il n'en va pas de même pour le temps minimal de parcours d'un point matériel de vitesse initial nulle entre ces deux points dans un champs gravifique continu.
La courbe brachistochrone représente la courbe de la trajectoire optimale du point matériel, en un temps minimal, entre ces deux points.
Cette courbe est en outre une cycloïde: (Soit p un point sur un cercle. Si on fait tourner ce cercle le long d'une droite, le trajet parcouru par le point p est alors une cycloïde).
Elle est aussi tautochrone: Soit n points matériels situés en des endroits différents, sur la courbe brachistochrone, entre a et b (b non-compris), le temps t pour arriver au point b sera équivalent pour les n points.
L'équation paramétrique de la courbe est de la forme suivante:

Objectif
La courbe brachistochrone est l'équation mathématique du parcours du point matériel. Mais il est possible de faire une représentation physique de la courbe et d'obtenir une physicalisation dynamique en faisant mouvoir des billes le long du parcours,
La physicalisation dynamique de la courbe bracistochrone représente l'intervalle de temps minimal pour parcourir la distance entre 2 points situés à des hauteurs différentes. Pour montrer qu'il s'agit de la courbe optimale , le prototype compare les intervalles de temps sur différentes trajectoires (droite, chute libre et brachistochrone).
La découpeuse laser permet de créer des "rampes" aux courbes variées. La courbe brachistochrone est parfois contre-intuitive, les individus préférant souvent des solutions tel que la chute libre ou la droite pour des trajets les plus rapides. En outre, les propriétés tautochrone de la courbe sont faciles à démontrer et souvent perturbantes pour un jeune public.
Intérêt pédagogique
Au secondaire, dès que les étudiants connaissent les dérivées et l'équation de l'énergie cinétique, ils peuvent déterminer l'équation de la courbe. Il est intéressant dans le cadre d'un cours de physique ou de mathématique de démontrer la solution par la physicalisation de l'équation.
La propriété tautochrone de la courbe et sa forme optimale pour un temps de parcours minimal sont des propriétés intéressantes pour un public plus jeune dans le cadre de cours d'observation et modélisation scientifique.
Représentation physique
En plus de la rampe représentant la courbe brachistochrone, le choix s'est donc porté sur une rampe droite allant du point a à b et une seconde rampe de la forme (1/x)^3 pour se rapprocher du modèle de la chute libre. Ces deux rampes permettent de borner la courbe brachistochrone en présentant des cas limites et facilitent ainsi la comparaison.
La construction des rampes a nécessité la découpe de plusieurs planches. Celles-ci ont ensuite été encollées les une sur les autres, la tranche des planches constituant la rampe sur laquelle la bille roule. Un cadre a été ajouté pour stabiliser la construction des 3 rampes accolées les une aux autres.
Le modèle initial a aussi évolué et a été légèrement modifié, des encoches ont été ajoutées aux bords des rampes pour permettre un système de blocage et le départ simultané des billes.
Après plusieurs utilisations, l'ajout d'un cache sur la partie verticale de la courbe (1/x)^3 peut s'avérer utile pour éviter que la bille ne sorte de la rampe.
La forme finale de la rampe brachistochrone pour la découpeuse laser.
La forme finale de la rampe droite pour la découpeuse laser.
La forme finale de la rampe "chute libre" pour la découpeuse laser
Le cadre de support pour soutenir le dispositif de la rampe brachistochrone.




Découpe et encollage des rampes

Les 3 rampes découpées au laser

Encollage d'une rampe avec la bordure

Encollage des 3 rampes.
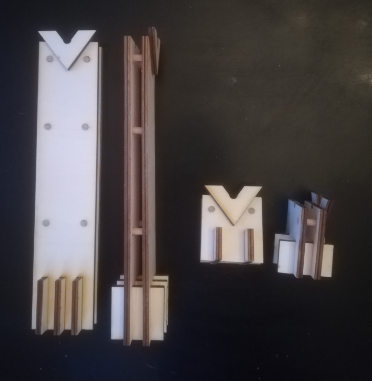
Les pièces du cadre de support pour les rampes.




